Image classification in the open-world must handle out-of-distribution (OOD) images. Systems should ideally reject OOD images, or they will map atop of known classes and reduce reliability. Using open-set classifiers that can reject OOD inputs can help. However, optimal accuracy of open-set classifiers depend on the frequency of OOD data. Thus, for either standard or open-set classifiers, it is important to be able to determine when the world changes and increasing OOD inputs will result in reduced system reliability. However, during operations, we cannot directly assess accuracy as there are no labels. Thus, the reliability assessment of these classifiers must be done by human operators, made more complex because networks are not 100% accurate, so some failures are to be expected. To automate this process, herein, we formalize the open-world recognition reliability problem and propose multiple automatic reliability assessment policies to address this new problem using only the distribution of reported scores/probability data. The distributional algorithms can be applied to both classic classifiers with SoftMax as well as the open-world Extreme Value Machine (EVM) to provide automated reliability assessment. We show that all of the new algorithms significantly outperform detection using the mean of SoftMax
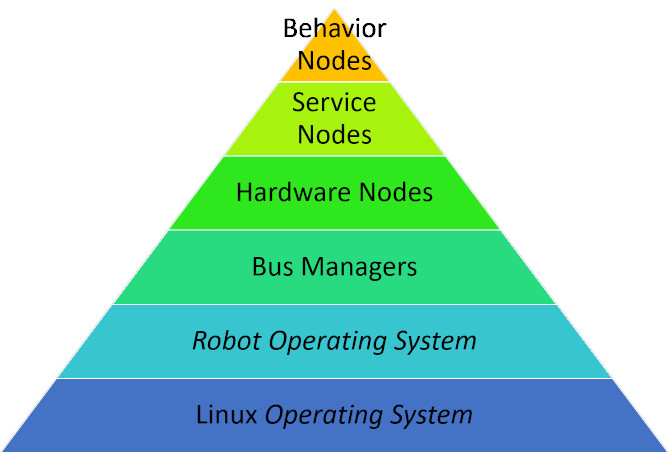
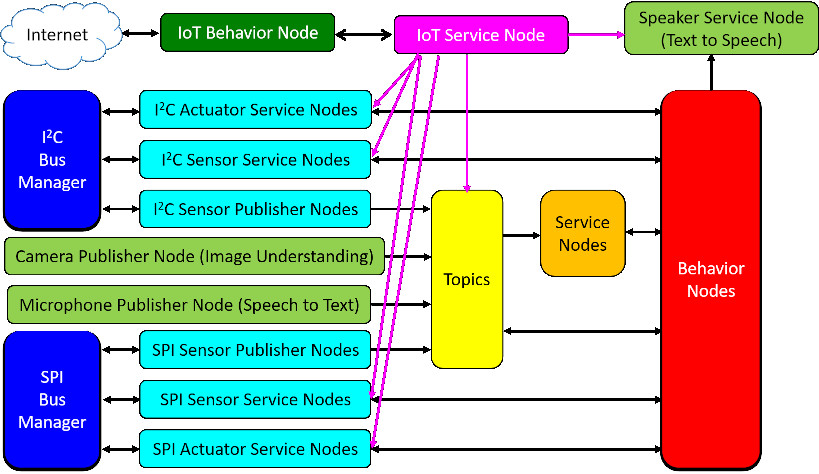
Currently, most social robots interact with their surroundings and humans through sensors that are integral parts of the robots, which limits the usability of the sensors, human–robot interaction, and interchangeability. A wearable sensor garment that fits many robots is needed in many applications. This article presents an affordable wearable sensor vest, and an open-source software architecture with the Internet of Things (IoT) for social humanoid robots. The vest consists of touch, temperature, gesture, distance, vision sensors, and a wireless communication module. The IoT feature allows the robot to interact with humans locally and over the Internet. The designed architecture works for any social robot that has a general-purpose graphics processing unit (GPGPU), I2C/SPI buses, Internet connection, and the Robotics Operating System (ROS). The modular design of this architecture enables users to easily add/remove/update complex behaviors. The proposed architecture provides IoT technology, GPGPU nodes, I2C and SPI bus mangers, audio-visual interaction nodes (speech to text, text to speech, and image understanding), and isolation between behavior nodes and other nodes. The proposed IoT solution consists of related nodes in the robot, a RESTful web service, and user interfaces. We used the HTTP protocol as a means of two-way communication with the social robot over the Internet. Users can easily edit or add nodes in C, C++, and Python programming languages. Our architecture can be used for designing more sophisticated behaviors for social humanoid robots.
Speech is one of the most common forms of communication in humans. Speech commands are essential parts of multimodal controlling of prosthetic hands. In the past decades, researchers used automatic speech recognition systems for controlling prosthetic hands by using speech commands. Automatic speech recognition systems learn how to map human speech to text. Then, they used natural language processing or a look-up table to map the estimated text to a trajectory. However, the performance of conventional speech-controlled prosthetic hands is still unsatisfactory. Recent advancements in general-purpose graphics processing units (GPGPUs) enable intelligent devices to run deep neural networks in real-time. Thus, architectures of intelligent systems have rapidly transformed from the paradigm of composite subsystems optimization to the paradigm of end-to-end optimization. In this project, we desiend an end-to-end convolutional neural network (CNN) that maps speech 2D features directly to trajectories for prosthetic hands. The proposed convolutional neural network is lightweight, and thus it runs in real-time in an embedded GPGPU. The proposed method can use any type of speech 2D feature that has local correlations in each dimension such as spectrogram, MFCC, or PNCC. We omit the speech to text step in controlling the prosthetic hand in this project. The network is written in Python with Keras library that has a TensorFlow backend. We optimized the CNN for NVIDIA Jetson TX2 developer kit. Our experiment on this CNN demonstrates a root-mean-square error of 0.119 and 20ms running time to produce trajectory outputs corresponding to the voice input data. To achieve a lower error in real-time, we can optimize a similar CNN for a more powerful embedded GPGPU such as NVIDIA AGX Xavier.

Speech recognition is one of the key topics in artificial intelligence, as it is one of the most common forms of communication in humans. Researchers have developed many speech-controlled prosthetic hands in the past decades, utilizing conventional speech recognition systems that use a combination of neural network and hidden Markov model. Recent advancements in general-purpose graphics processing units (GPGPUs) enable intelligent devices to run deep neural networks in real-time. Thus, state-of-the-art speech recognition systems have rapidly shifted from the paradigm of composite subsystems optimization to the paradigm of end-to-end optimization. However, a low-power embedded GPGPU cannot run these speech recognition systems in real-time. In this project, we showed the development of deep convolutional neural networks (CNN) for speech control of prosthetic hands that run in real-time on a NVIDIA Jetson TX2 developer kit. First, the device captures and converts speech into 2D features (like spectrogram). The CNN receives the 2D features and classifies the hand gestures. Finally, the hand gesture classes are sent to the prosthetic hand motion control system. The whole system is written in Python with Keras, a deep learning library that has a TensorFlow backend. Our experiments on the CNN demonstrate the 91% accuracy and 2ms running time of hand gestures (text output) from speech commands, which can be used to control the prosthetic hands in real-time.

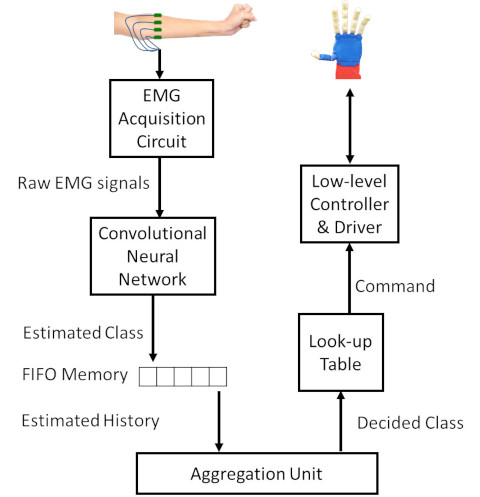
Natural muscles provide mobility in response to nerve impulses. Electromyography (EMG) measures the electrical activity of muscles in response to a nerve’s stimulation. In the past few decades, EMG signals have been used extensively in the identification of user intention to potentially control assistive devices such as smart wheelchairs, exoskeletons, and prosthetic devices. In the design of conventional assistive devices, developers optimize multiple subsystems independently. Feature extraction and feature description are essential subsystems of this approach. Therefore, researchers proposed various hand-crafted features to interpret EMG signals. However, the performance of conventional assistive devices is still unsatisfactory. In this project, we propose a deep learning approach to control prosthetic hands with raw EMG signals. We use a novel deep convolutional neural network to eschew the feature-engineering step. Removing the feature extraction and feature description is an important step toward the paradigm of end-to-end optimization. Fine-tuning and personalization are additional advantages of our approach. The proposed approach is implemented in Python with TensorFlow deep learning library, and it runs in real-time in general-purpose graphics processing units of NVIDIA Jetson TX2 developer kit. Our results demonstrate the ability of our system to predict fingers position from raw EMG signals. We anticipate our EMG-based control system to be a starting point to design more sophisticated prosthetic hands. For example, a pressure measurement unit can be added to transfer the perception of the environment to the user. Furthermore, our system can be modified for other prosthetic devices.

In this project, we showed novel methods in real-time path planning of a humanoid robot in unknown environments. We used an NAO H25 V4 for experiments. This project has two parts. These methods have been developed and successfully tested on an experimental humanoid robot (NAO H25 V4).
In the first part, we combine artificial potential field path planning method with two different fuzzy inference systems. In the first approach, the direction of the moving robot is derived from fuzzified artificial potential field whereas, in the second one, the direction of the robot is extracted from some linguistic rules that are inspired from the artificial potential field.
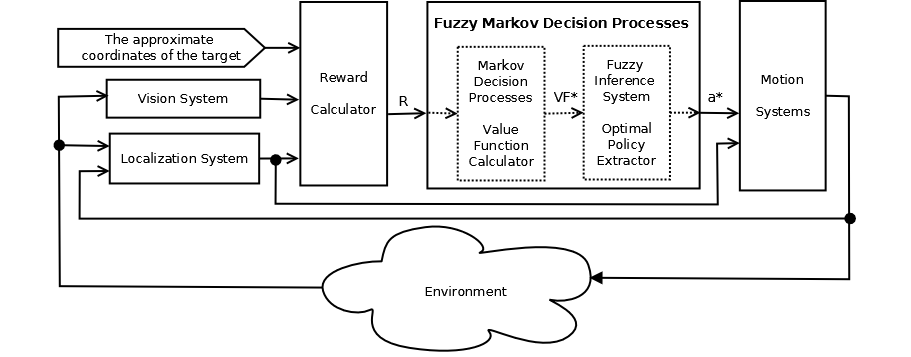
In the second part, we used fuzzy Markov decision processes (FMDP) to find a locally optimal path. The reward function has been calculated without exact estimation of the distance and shape of the obstacles. We also use value iteration to solve the Bellman equation in real time. Using the fuzzy inference system leads to a smoother optimal path. The method can work with noisy data. This method requires only one camera and does not need range computing.